Система управления автономными роверами
Система управления беспилотными колесными платформами (роверами), представляет собой комплекс программ, которые обеспечивают передвижение роверов, возможность удобного взаимодействия пользователя с роверами, создание инфраструктуры для передвижения (карты маршрутов, точки, задания, системы пользователей с разграничением прав и так далее).
Система состоит из трех основных компонентов:
1. Серверное приложение - обеспечивающее хранение данных и общение между пользователем и ровером
2. Приложение для ровера - обеспечивает передвижения ровера, работу с установленным оборудованием и получение информации и команд от сервера
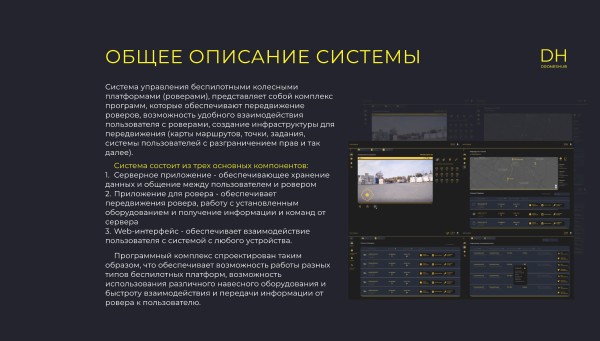
3. Web-интерфейс - обеспечивает взаимодействие пользователя с системой с любого устройства.
Программный комплекс спроектирован таким образом, что обеспечивает возможность работы разных типов беспилотных платформ, возможность использования различного навесного оборудования и быстроту взаимодействия и передачи информации от ровера к пользователю.